
History
目次
- NHK学生ロボコン2025
- NHK学生ロボコン2024
- NHK学生ロボコン2023
- NHK学生ロボコン2022
- NHK学生ロボコン2021
- NHK学生ロボコン2020
- NHK学生ロボコン2019
- NHK学生ロボコン2018
- NHK学生ロボコン2017以前は製作中です。更新をお待ちください!
歴代のNHK学生ロボコン
NHK学生ロボコン2025
概要
開催日:2025年6月8日
テーマ:ROBOT BASKETBALL
RoboTechの戦績(NHK):優勝
RoboTechの戦績(ABU):優勝
詳しくはこちら!
ルール概説
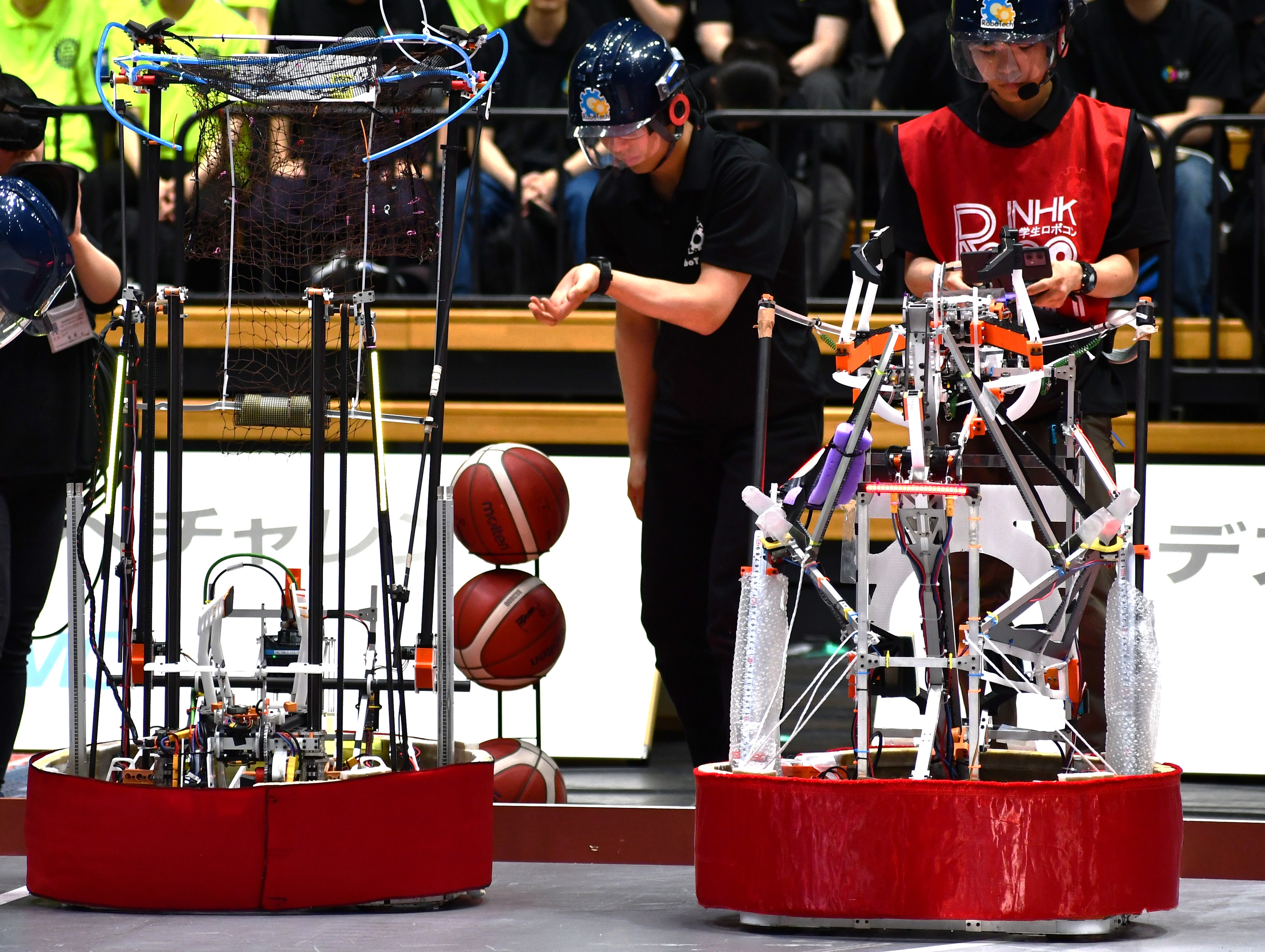
今年のルールは、バスケットボール。
人の行うバスケのように、パスやドリブル、シュートやダンクが繰り広げられます!
自チームの攻撃ターン時に「機体間のパス」か「ドリブル」を1度以上行うことで、シュートに移ることができます。シュートは近くから決めると2ポイント、遠くから決めると3ポイント、飛び上がってのダンクシュートは7ポイントが入ります。
攻撃のターンを交互に行い、試合終了時の点数が高い方が勝ちとなります。
勝負のカギ
各ターンは20秒で終了するため、20秒で的確にパスやドリブル、シュートを行う、あるいは20秒間敵の攻撃を守り切るという、素早く正確な動作が求められます。
その一方で、シュートを決めようとしている敵機体に対してファウルを行うと、相手の行おうとしているシュートの得点が有効になってしまうため、冷静で慎重な操縦も必要となります。
RoboTechのロボット
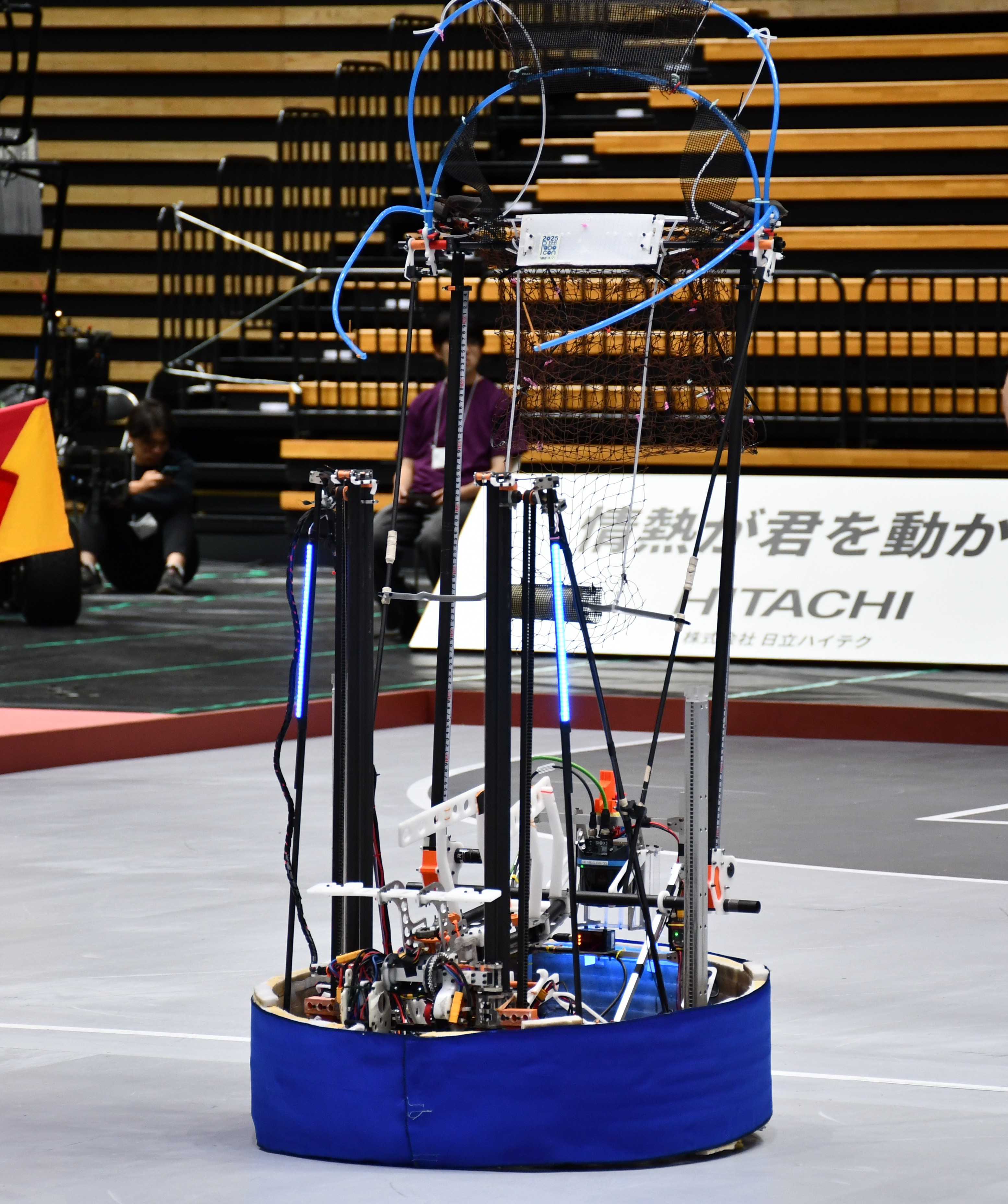
R1:震天
オフェンス時にはパスをすることも、ドリブルをして自分でシュートをすることも可能です。
安定して高速な足回りで相手の隙を突き、選択の多彩さで相手を翻弄します。
シュートを行う際は、直動機構で遠くからでも得点を得ることが可能です。
また、ディフェンス時には複数の展開機構が展開し、シュートもドリブルも防ぎます。
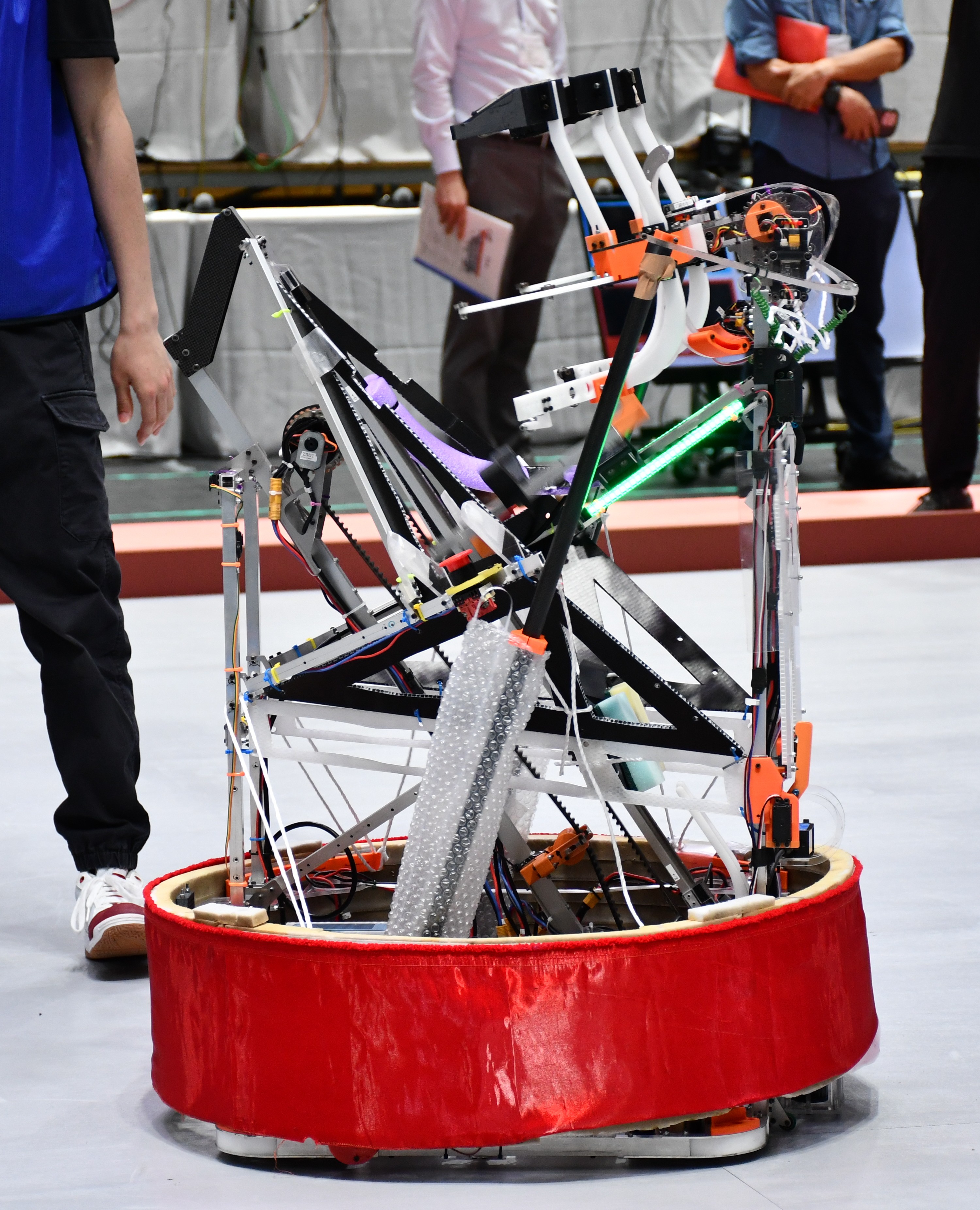
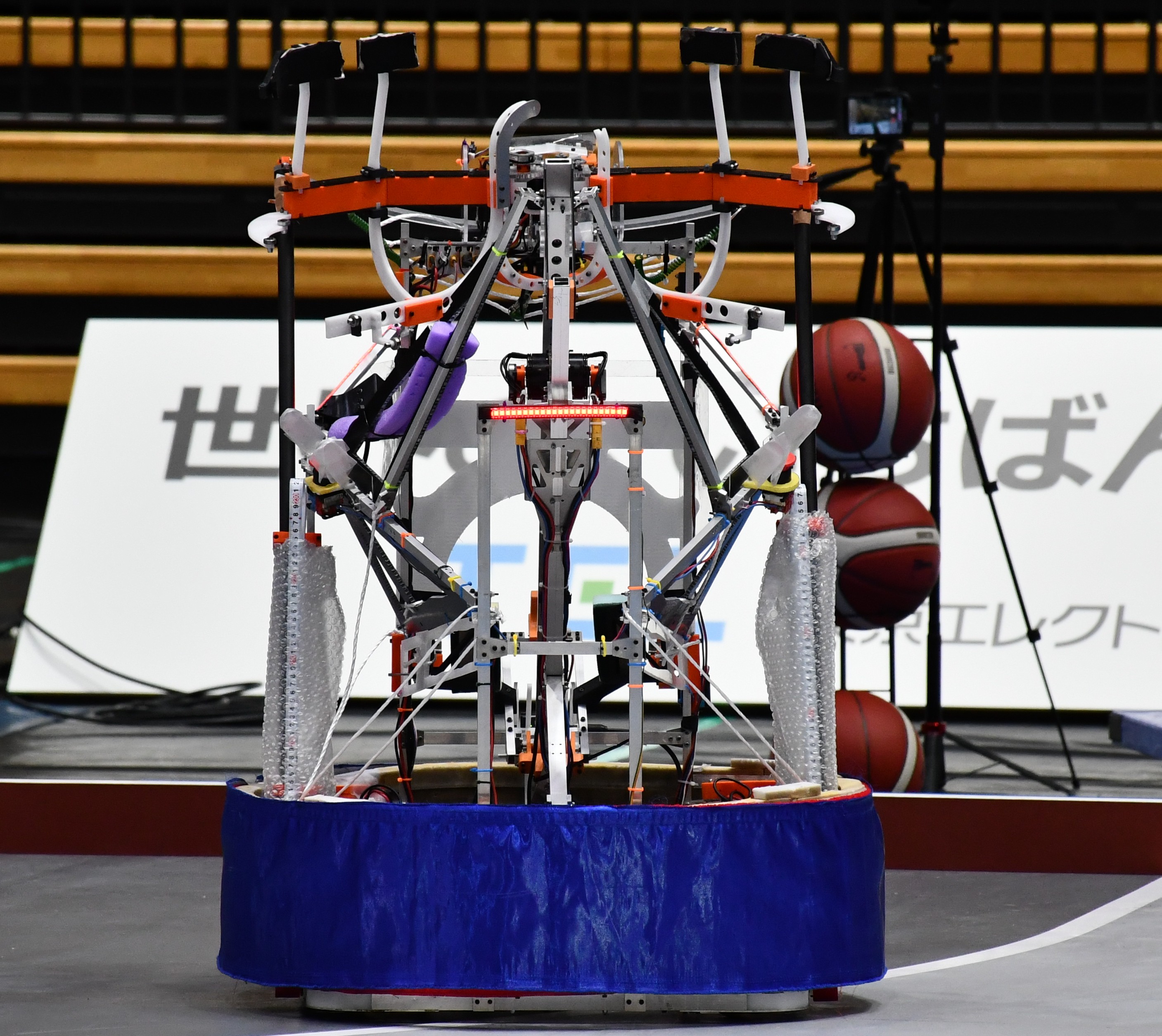
R2:動地
オフェンス時にドリブル、シュート、ダンクシュートが行える機体です。
安定した足回りで敵の防御を掻い潜り、大きく広げた展開機構で震天からのパスを受け取り、小回りを効かせて敵のいない所でドリブルをした後に高得点のダンクシュートを決めることができます。
こちらも、震天に頼らず単騎での攻撃も可能です。

大会結果
予選第一試合の大阪大学戦では、ダンクシュート1回を含んだ13点(今大会最高得点)を獲得し、初戦から予選通過に大きく近づきます。
この際ダンク後に動地が倒れるアクシデントもありましたが、震天の単独3pを繰り返して予選第二試合の工学院大学戦も8-0で勝利を収めます。
決勝リーグに1位通過し迎えた準々決勝の東北大学戦では、震天が投擲や足回りに不調を抱えながらも相手のファウルを誘いつつ2-0で勝利をおさえました。
準決勝の長岡技術科学大学戦では、上記の不具合を全て直しきり、震天がシュートを連発したことで9-0で勝利しました。
決勝の相手は、NHKロボコン3連勝中で、昨年も決勝戦で対峙した豊橋技術科学大学との一戦でした。 先に3ポイントシュートを決められるも、動地のダンクシュート中にファウルが発生してこちらが7点を獲得します。その後の熱い攻防では互いに点数がきまらず、7-3で勝利、RoboTechが5年ぶりのNHKロボコン優勝を達成いたしました!
各種リンク
チーム紹介動画
機体紹介動画
ABUロボコン2025で優勝しました!(報告記事)
NHK学生ロボコン2024
概要
開催日:2024年6月9日
テーマ:HARVEST DAY
RoboTechの戦績:準優勝

詳しくはこちら!
ルール概説
今年のルールは、開催国ベトナムの棚田での稲作をテーマにしており、田植え、収穫、貯蔵の3つの作業をモチーフにしたタスクに挑みます。
ロボット1は、苗を模した筒を所定の場所に置くことで「田植え」を、米粒を模したボールを投げて移動させることで「収穫」を行います。
これと並行して、ロボット2は、ボールを色によって選り分け、穀物倉庫に見立てたかご「サイロ」にボールを入れることで「貯蔵」を行います。なお、ロボット2は、全自動で動かなければなりません。
サイロの部分には、相手チームも反対側からボールを入れてくるので、さながら玉入れ合戦の模様を呈します。
勝負のカギ
全自動であるロボット2が、ボールの位置や色、どのサイロに何個ボールが入っているか、などの状況把握をいかに正確に行い、それをもとにいかに適切・高速に行動できるか。
そして、その全自動のロボット2のポテンシャルを、手動操縦のできるロボット1がいかに引き出すか。
2台のロボットのシナジーも大きな勝負の鍵となりました。
RoboTechのロボット
R1:NYAN(にゃん)
田植えと収穫のタスクで必ずどちらも満点を取る、という高い要求をクリアできるように設計されました。
4本の苗を同時に持てるハンドと、バックスピンをかけてボールを発射できる仕組みを備えています。
また、大会唯一となる、エリア間の段差を乗り越えられる機構を搭載しており、障害物をものともせず、フィールドを縦横無尽に駆け回ります。

R2:FRONTIER(ふろんてぃあ)
高度な環境認識を基軸に、高速化を突き詰めた機体です。
複数のカメラ・センサーを用いて、紫色のボールと自陣の色のボールを見分け、赤/青のボールのみをサイロに運びます。
どのサイロに入れるかも、認識結果をもとに、戦術的に最適なサイロを選択するようになっています。

また、こちらも大会唯一となる壁キック機構を駆使し、ボールのあるエリアとサイロとの往復タイムで全チーム最速を実現しました。

大会結果
予選の2試合では、Mùa Vàng (VGoal)達成はならなかったものの、2試合とも得点によって勝利し、予選順位2位で決勝トーナメントに駒を進めました。
決勝トーナメントでは、準々決勝で本来の持ち味である素早い動作をほぼ完璧に行い、大会を通して全チーム最速タイムとなる1分05秒でのMùa Vàng 達成に成功して勝利しました。
次の準決勝では、ロボット2のリトライがあるなど苦しみながらも得点で勝利し、昨年度大会で敗北した大学への雪辱を果たしました。
最後の決勝では、ロボット2のスピードの優位性を生かして開始から30秒間はリードしていたものの、ロボット2のリトライが必要となり、その間に逆転され、最終的に得点差で敗北してしまいました。
技術紹介動画

各種リンク
公式PV
NHK学生ロボコン2023
概要
開催日:2023年6月4日
テーマ:Casting Flowers over Angkor Wat
RoboTechの戦績:ベスト4

詳しくはこちら!
ルール概説
世界遺産アンコールワットに花輪を手向けることをテーマに、1チーム2台のロボットが輪投げゲームを行います。より多くの塔に輪をかけられたチームの勝利となります。
勝負のカギ
各チームは性格の異なる2台のロボットを製作します。1台は機体は大きいもののあまり移動できない「ぞうロボット」、2台目は小さいがよく動き回れる「うさぎロボット」。2つのロボットがいかに協力して、刻一刻と変化する試合の状況に対応していくかが勝負のカギとなりました。
RoboTechのロボット
ぞうロボット:“森羅”
花輪を発射する機構を2門備え、自陣側の塔を中心に確実に得点を重ねます。

うさぎロボット:“因幡”
1門の発射機構による正確な輪投げと、素早い足回りを駆使し、相手陣の塔も狙って一気に決着をつけます。

大会結果
正確な輪投げと素早い移動が強みのRoboTech。予選第1試合では、その輪投げの正確さによって、わずか40秒で試合に勝利します。しかし、続く予選第2試合で、ぞうロボットが不調に陥り、ハンドが壊れてしまいます。それでもこの試合には無事勝利し、全体予選順位2位で決勝トーナメントに駒を進めます。
ぞうロボットのハンド故障は決勝トーナメントでも東大チームを苦しめることになります。ぞうロボットの輪投げがままならない中、うさぎロボットは単騎で善戦し、準々決勝では勝利を収めることができました。
しかし、準決勝ではその頑張りも一歩及ばず、相手ロボット2台との大白熱の輪投げ合戦の末に敗れ、RoboTechはベスト4という結果に終わりました。
技術紹介動画
各種リンク 「NHK学生ロボコン2023」に出場しました!(報告記事)
NHK学生ロボコン2022
概要
開催日:2022年6月12日
テーマ:LAGORI~ラゴリ~
RoboTechの戦績:ベスト4・特別賞(株式会社ナガセ賞)受賞

詳しくはこちら!
ルール概説
NHK学生ロボコン2022の競技ルールは、インドの人々が昔から慣れ親しんできた「ラゴリ」という屋外ゲームをモチーフに作られました。
「シーカー」と呼ばれるチームが「ラゴリ」と呼ばれる塔を倒し、再度元あった順番に積み上げることを目指します。「ヒッター」と呼ばれるチームはボールを「シーカー」にあてることで塔の積み上げの阻止を狙います。
各チームは2台のロボットを製作し、試合は、2ラウンド(ラウンド1、ラウンド2)に分かれて行います。
チームの役割はラウンドごとに入れ替わります。ラウンド1では赤チームがシーカー、青チームがヒッターになります。ラウンド2では赤チームがヒッター、青チームがシーカーとなります。
ラウンドが始まると、シーカーはボールを投げてラゴリディスクを崩し、元の順序で積み上げます。崩したラゴリディスクと積み上げられたラゴリディスクの数に応じてチームは得点を獲得します。
シーカーがラゴリディスクを積み上げて「ラゴリパイル」や「パーフェクトラゴリ」を達成するのを防ぐために、ヒッターはシーカーにボールを当てて邪魔をします。
シーカーは頭上にボールを置いていて(Ball on Head 以下BOHとする)、ヒッターはその頭上のボールにボールをぶつけてはじき出すことで、相手のラゴリパイルを停止させることができます。
シーカーはラゴリをうまく積み上げ、パーフェクトラゴリを達成できるのか?ラゴリ積み上げを達成する前にボールを当てられてしまうのか?
その攻防がラゴリの魅力です。(写真はルールブックより引用)

勝負のカギ
学生ロボコンでは初となる「2ラウンド制」が本格的に導入されたルールです。また学生ロボコン2021に引き続き相手のロボットの行動によって自分の特典が左右される「インタラクション」のあるルールとも言えます。
RoboTechでは強みとなる足回りの速さを生かした「ヒッターラウンドにおいて最速で相手のBOHを落とすこと」を第一コンセプトとしました。妨害のできるヒッターラウンドで相手のラゴリパイルをいち早く終わらせようという作戦です。
シーカーラウンドではなるべく早くラゴリを積み上げるようにすることはもちろんのこと、相手にBOHを狙われないようにする工夫や、ヒッターラウンドで稼いだ得点数差を維持できるような特別な機体の動かし方を用意しました。
RoboTechのロボット
R1:“屋島”
主戦場はヒッターラウンド。3つの回転するタイヤでボールを射出するロボットです。
このロボットのコンセプトは「ヒッターラウンドにおいて最速で正確なBOHを落とすこと」「シーカーラウンドにおいて正確に再現性のあるラゴリ崩しの実現をすること」です。
RoboTechが強みとするSwerve(独立ステアリング機構)を搭載し、巻取り機構でボールを素早く回収した後、3つのタイヤローラーでボールを正確に射出します。
Seekerラウンドでは、ボールの射出速度・射出角度・回転数等を変えてテストラン回数を重ねることで、五持羅が拾いやすくなるようなラゴリの崩し方を模索しました。

R2:“五持羅”
主戦場はシーカーラウンド。Lagoriを実際に積み上げることを目的とするロボットです。
このロボットのコンセプトは「ヒッターラウンドにおいて正確な屋島の投擲を補佐すること」「シーカーラウンドにおいて相手にBOHを落とされないようにしつつ、できるだけ早くラゴリを積み上げること」です。
操縦しやすいオムニホイールの足回りを採用し、ラゴリを1つずつ回収しながら内部で組み立てます。一番小さいラゴリはBOHの前に持ってくることでBOHの一部防御をします。「L1パイル」という特殊な動きをすることで、東大と似たような作戦(シーカーラウンドで高速BOH落としを狙う作戦)を取る大学に対して、得点差で勝てるようん動きを用意していました。
ヒッターラウンドでは、相手のBOHの動きをセンサで読み取り、屋島に位置情報を送ることで、屋島の高精度な投擲の支援をしていました。

大会結果
ベスト4(特別賞(株式会社ナガセ賞)受賞)
予選を全体の2位で通過、決勝トーナメントにシード校として勝ち進みました。
決勝トーナメントの準決勝において、相手と総合スコアは同点だったものの、タスク達成の優先度により敗北しました。
技術紹介動画
各種リンク
NHK学生ロボコン2021
概要
開催日:2021年10月10日
テーマ:Throwing Arrows into Pots
RoboTechの戦績:準優勝

詳しくはこちら!
ルール概説
「投壺」という古代中国の伝統的なゲームをモチーフに、1チーム2台のロボットが壺に矢を投げ入れるゲームで競います。壺により多くの矢を入れられたチームの勝利となります。
勝負のカギ
2台のロボットのうち1台は壺に矢を投げ入れるロボット、もう1台は壺を動かす等により相手チームの矢が壺に入らないように妨害するロボットです。矢の投擲精度の高さと妨害の工夫が勝敗を分けます。
RoboTechのロボット
Throwing Robot: Alice
ラックから素早く矢を回収し、回転投擲により1本ずつ矢を正確に投げ入れていきます。投擲する前に矢をクルっと回転させる動きが優雅です。

Defensive Robot: Mallory
試合開始後に1本だけ矢を投げたあとは即座に壺の妨害に向かいます。代々受け継がれてきた自慢の足回りにより、あっという間に壺に到達し相手の得点を防ぎます。

大会結果
機体トラブルを乗り越え、4位で決勝トーナメントに進出しました。決勝戦で長岡技術科学大学にあと一歩及ばず、準優勝で大会を終えました。これにより、12月12日にABUロボコンへ出場しました。
チーム紹介ビデオ(ロボコン公式のYouTubeチャンネルです)
各種リンク
NHK学生ロボコン2020
概要
テーマ:ROBO RUGBY
RoboTechの戦績:オンライン学ロボフェスティバル 1位・ABU ROBOCON FESTIVAL 1位

詳しくはこちら!
ルール概説
ABU 開催予定国だったフィジーの国民的競技であるラグビーを題材としています。
パスロボットとトライロボットが連携してボールをパス、レシーブ、トライし、最後にボールをキックを行う、というルールとなっています。
勝負のカギ
正確なパスは勿論のこと、得点の高いキックを相手より多く成功させるため、無駄のない動きとスピードが勝利の鍵でした。
RoboTechのロボット
トライロボット:“疾風” (写真右側)
改良を重ねたレシーブ機構と、素早いトライを実現するための壁蹴り機構が持ち味です。
この壁蹴り機構はNHK学生ロボコン2024のロボット「Frontier」にも受け継がれました。
パスロボット:“雅” (写真左側)
「雅」の持ち味は、素早い移動と正確な疾風への投躑、そして「雅」なキック!
8m以上も離れた場所から正確なキックを決めます。
大会結果
新型コロナウイルスの感染拡大の影響を受けて開催が中止となった「NHK 学生ロボコン」の代替となるイベント、「オンライン!学ロボ FESTIVAL」にて1位を獲得しました。
また、開催が中止となった「ABU ROBOCON」の代替となるイベント、「ABU ROBOCON FESTIVAL」にて1位を獲得しました。
PRビデオ1(ロボコン公式のYouTubeチャンネルです)(English Version)

PRビデオ2(ロボコン公式のYouTubeチャンネルです)
(English Version)

PRビデオ3(ロボコン公式のYouTubeチャンネルです)
(English Version)

各種リンク
「オンライン!学ロボFESTIVAL」で1位をいただきました!(報告記事)
ABU ROBOCON FESTIVALで1位をいただきました!(報告記事)
NHK学生ロボコン2019
概要
テーマ: グレート・ウルトゥー
RoboTechの戦績:ベスト4、技術賞

詳しくはこちら!
ルール概説
モンゴルの伝統的な馬による駅伝システム【ウルトゥー】をモチーフに、1チーム2台のロボットで駅伝をして競います。競技進行に際して【シャガイ】と呼ばれるサイコロを投げて点数を稼いでゴール地点への通行権を獲得し、先にゴールへ到達したチームの勝利になります。
勝負のカギ
シャガイを投げた時に狙った目を出す技術、そしてロボコン史上稀な四足歩行という縛りを課せられたロボットの移動スピードが勝利の鍵になります。
RoboTechのロボット
メッセンジャーロボット1: そうじき
通行証である【ゲルゲ】を素早くフレーミー(もう片方のロボット)に渡すため、曲がりくねった道や狭い道の上を高速で走り抜けます!

メッセンジャーロボット2: フレーミー
例年と違い片方のロボットは四足歩行とすることが義務付けられており、RoboTechは足を完全に独立して動かすことのできるロボットを制作しました。車輪を用いたロボットと遜色ないスピードで動く四足歩行ロボットが今大会での見どころです。

大会結果
予選を順調に 1 位で通過し、決勝リーグ 1 回戦にて、本大会で最速記録となる 25 秒で勝利するも、続く準決勝でれ、ベスト 4 という結果に終わりました。
表彰では「優勝に値する」とのお言葉を頂き、「技術賞」を受賞しました。
チーム紹介ビデオ(ロボコン公式のYouTubeチャンネルです)
各種リンク
NHK学生ロボコン2018
概要
テーマ: 「ネムコン」 “シャトルコック・スローイング”
RoboTechの戦績(NHK):優勝
RoboTechの戦績(ABU):ベスト4、「ABUロボコン大賞」、「2nd Runner-ups敢闘賞」、「トヨタ自動車株式会社様からの特別賞」

詳しくはこちら!
ルール概説
ベトナムの五穀豊穣を願う伝統行事「ネムコン」から着想を得たルールです。
片方のロボットがシャトルコックをもう片方のロボットへと受け渡し、シャトルをもらったロボットがシャトルを高い位置にあるリングをめがけて振り投げます。
ノーマルリングと呼ばれるリングにシャトルを2回通した後、ゴールデンリングと呼ばれるより高い位置にあるリングにシャトルを通し、かつ向こう側の地面にあるゴールデンカップに入れることができたら、その時点で勝利となります。
勝負のカギ
比較的シンプルなルールで、一瞬にして決着がつく試合が多かったです。
シャトルの受け渡しもシャトルの振り投げも、100%の正確性を前提にした上でどこまで無駄を削ぎ落してタイムを短縮できるか、という点がカギになりました。
RoboTechのロボット
キャリーイングロボット: 彼氏
4つのタイヤの向きがそれぞれ独立に動く「独立ステアリング機構」を用いて、素早いシャトルの受け渡しを実現させています。

スローイングロボット: 彼女
こちらも独立ステアリング機構を用いており、素早い移動ののち、シャトルを回して正確に投げ、最速でのゴール、優勝を狙います!

大会結果
RoboTechは、前日テストランで調整をしっかりと行い、大会当日は予選から決勝戦までほぼ完璧な動きを見せ、優勝をつかみ取りました。
ABUロボコンにおいても、大会当日、テストランでは順調だったロボットがうまく動かない中、見事な逆転を決め予選を突破。決勝リーグ一回戦では実力を発揮し、勝利を収めましたが、続く2回戦では、優勝したベトナムのチームに惜敗し、ベスト4となりました。
優勝こそできなかったものの、「ABUロボコン大賞」、「2nd Runner-ups敢闘賞」、「トヨタ自動車株式会社様からの特別賞」と多くの賞を受賞することができました。
チーム紹介ビデオ(ロボコン公式のYouTubeチャンネルです)
各種リンク